
PRINCE PASSIVE MECHANICAL AND RENDEZVOUS INTERFACE FOR CAPTURE AFTER END-OF-LIFE
2019 | ESA ITT on the framework of Clean Space Design for removal (D4R) activities
Development of active and passive mechanical interfaces for satellite capture at EOL in the frame of PRINCE project.
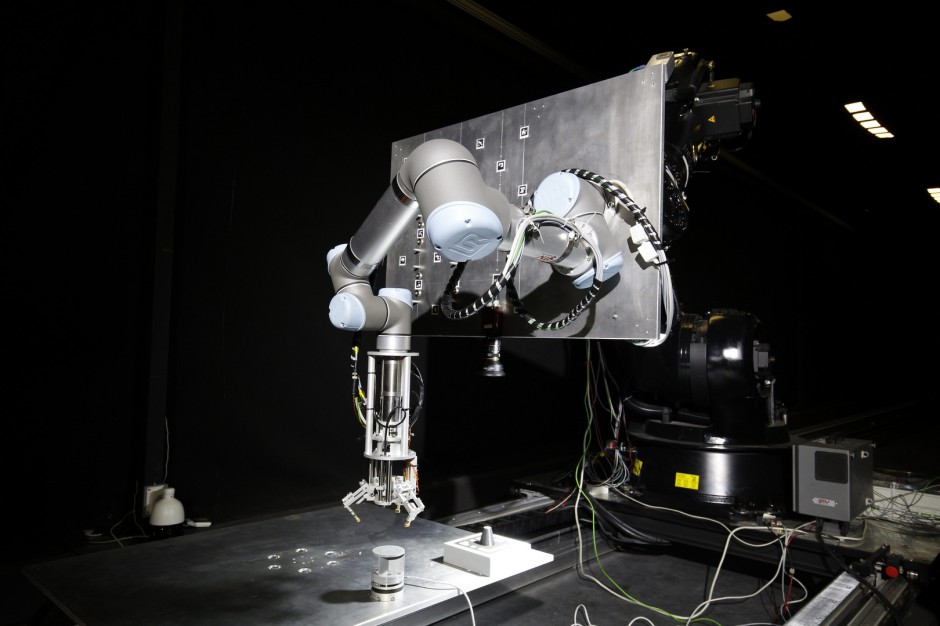
AVS and GMV have developed and tested a mechanical and rendezvous interface for capture after End-of-Life. From Concept design to Breadboard testing… in 6 months!
The objectives of the project were to:
- Develop a visual servoing system for capture after EoL.
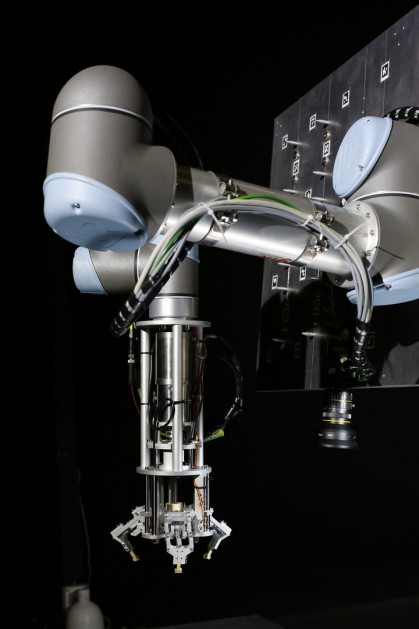
- Develop passive and active mechanical interfaces to perform the capture.
- Integrate the visual system and the mechanical I/Fs and test its functional performance.
PRINCE comprises:
- a Passive Interface (PIF) (mechanical I/F + navigation aids)
- a Mechanical I/F (AIF) on the Space Servicing Vehicle (e.g. gripper at the end of a robotic arm)