
PRO-ACT Planetary Robots Deployed for Assembly&Construction of Future Lunar ISRU &Supporting Infrastructures
2019 - 2022 | European Commission (H2020)
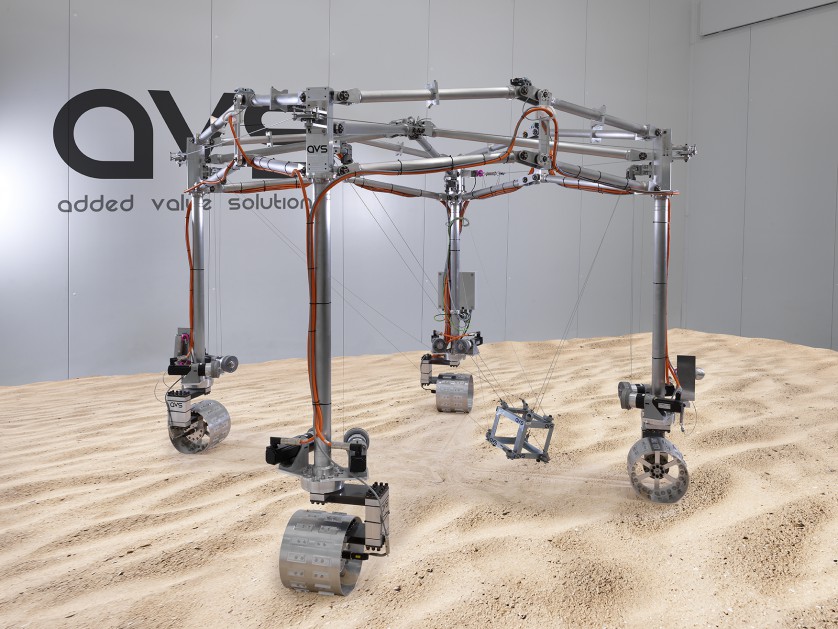

Design, manufacturing and assembly of the mobile gantry for PRO-ACT, robotic collaboration for ISRU
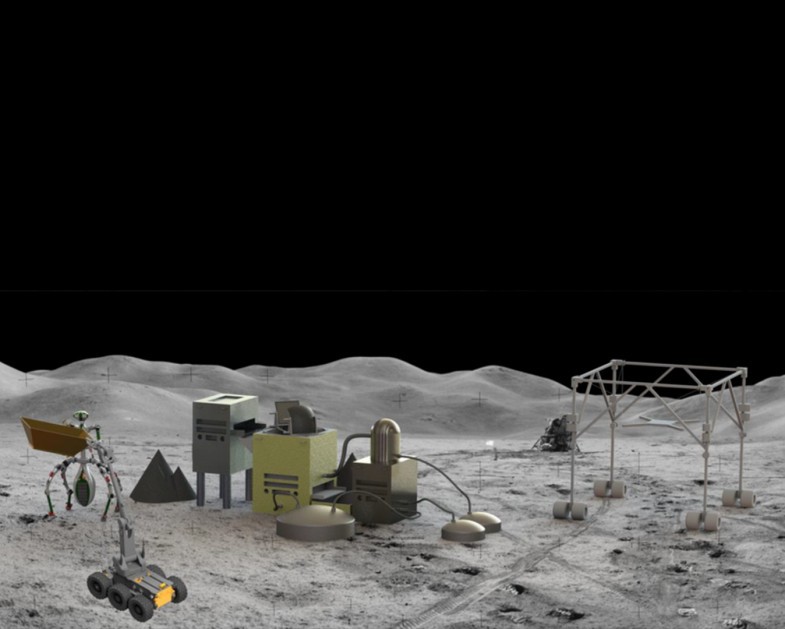
The Horizon 2020 EU-funded PRO-ACT project will aim to develop and demonstrate cooperation and manipulation capabilities between three robots for assembling an in-situ resource utilisation (ISRU*) plant. The project will build on the technological results of other project outcomes from the PERASPERA project and its operational grants (OGs). PRO-ACT will show how robot working agents, or RWAs, can work together collaboratively to achieve a common goal.
The PRO+ACT project is being completed by a consortium of European companies.
AVS is in charge of the design, manufacturing and assembly of the mobile gantry. The mobile gantry is composed by a structure that will be deployed by collaboration of RWAs** and the cable robot which will be used for 3D printing and object manipulation also in collaboration with other RWAs.
Discover more:

*ISRU: In-situ resource utilisation is a sustainable way to explore space. Resources that are already available on Moon, planetary or asteroid surfaces in our solar system are collected and used during exploration missions for products, services or commercial purposes. Because our Moon, and the area between Earth and the Moon are the most accessible, they are the most attractive areas for ISRU experimentation. **RWA: Robot working agents. They are advanced robots which will demonstrate collaborative manipulation of objects with the end-effectors on their robotic arms.